

In this study, only fresh snow within a limited
ics using plasticity theory. They developed a two-
range of initial density (less than 250 kg/m3) was
dimensional finite difference model of tireterrain
interaction that simulated the plastic soil deformation
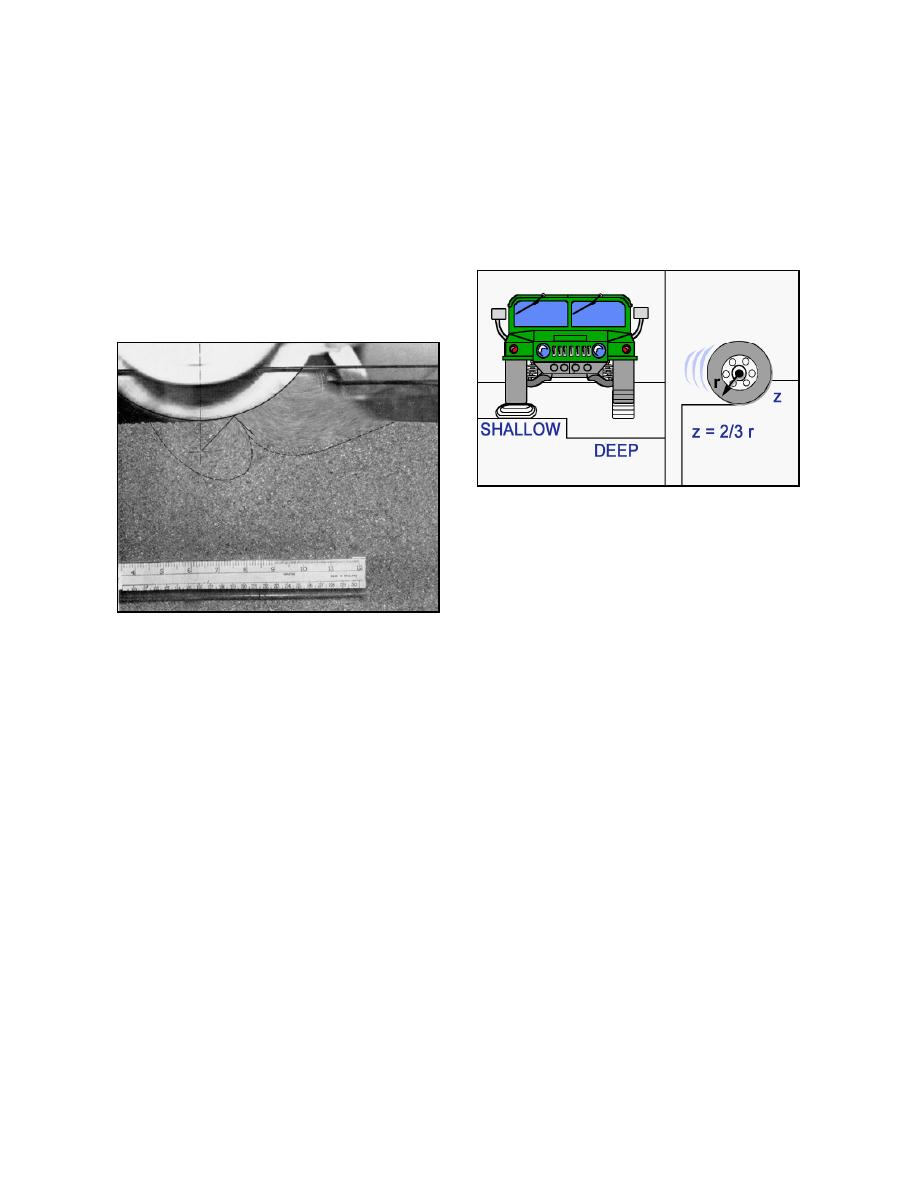
modeled. The snow depth, however, ranged from
under a tire, accurately reproducing the experimental
"shallow" to "deep." Shallow snow is defined as
measurements of sand deformation under a rigid
snow where the "pressure bulb" (the snow compacted
wheel by Wong and Reece (1967), as shown in Fig-
due to the weight of the vehicle) intersects a rigid
ure 1. More-recent seminal books on the subject are
interface. In deep snow the pressure bulb does not
those by Yong et al. (1984), which includes some of
intersect a rigid interface below the snow (Fig. 2).
the early finite element modeling of tireterrain inter-
action, and Wong (1989), who approaches numerical
modeling of tracked vehicles based on Bekker's
semi-empirical representation of the terrain.
Figure 2. Shallow and deep snow under a wheeled
vehicle.
Since the pressure bulb forms in response to a load
on the snow, the classification of deep or shallow
snow is vehicle dependent and therefore is a function
of the vehicle's weight, load distribution, tire or track
geometry, tire pressure, etc. Nonetheless, a rule of
Figure 1. Sand deformation under a towed wheel
thumb is that snow deeper than two thirds of the
moving to the right. Dashed lines show the soil
failure zones. (From Wong and Reece 1967.)
wheel radius is usually "deep" snow. Except for very
specialized vehicles, greater snow depths will impede
Because vehicleterrain interaction is compli-
wheeled vehicle travel because of excessive sinkage.
cated, comprehensive modeling of off-road mobility
Generally, tracked vehicles with low ground contact
is usually done using empirical algorithms based on
pressure are used to traverse deep snow. Figure 3
large data sets, such as the NATO Reference Mobil-
shows cross sections of the pressure bulb under a
ity Model (Ahlvin and Haley 1992). These are sup-
vehicle for shallow and deep snow.
plemented with high-fidelity simulations using so-
phisticated vehicle dynamics models, but in the
Tireterrain modeling
future these simulations will use vehicleterrain nu-
Because of the complexities involved in vehicle
merical models.
terrain interaction and the desire to incorporate more
of the physics into performance models, there is great
Vehicle movement on snow
interest in applying numerical modeling techniques.
Vehicle mobility on snow has some unique char-
Several researchers have produced numerical models
acteristics and terminology. The performance of a
simulating tireterrain interaction over the last 20
vehicle in snow is usually limited by the bearing
years. Many of the models are two-dimensional
strength of the snow, which controls the amount of
simulations of a rigid wheel on a deformable surface.
sinkage. Sinkage is a function of the compressibility
Yong and Fattah (1976) and Yong et al. (1978) intro-
and shear strength of the snow in response to the ve-
duced the first finite element models of tireterrain
hicle load. Since snow strength is difficult to measure
interaction using a two-dimensional rigid tire on de-
in the field on a routine basis, vehicle performance is
formable terrain and then progressing to an elastic
often related to index parameters that are easier to
tire and calculating the contact using Hertz contact
measure, such as the snow depth and density.
theory. This model was difficult to use, as it needed the
2

 Previous Page
Previous Page
