

8 10 3
3
7
8 x 10
6
6
5
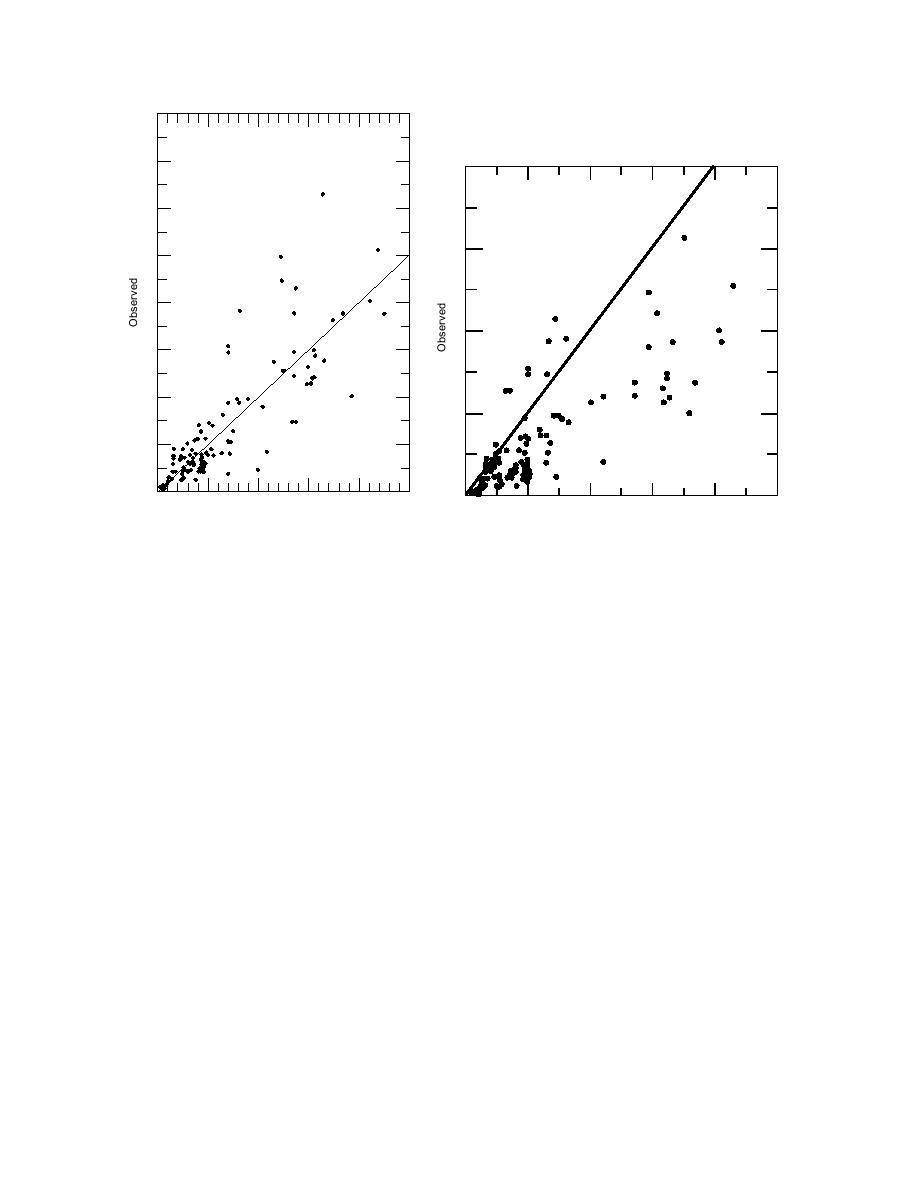
Under-predicted
4
4
3
Under-predicted
2
2
Over-predicted
Over-predicted
1
0
5 10 3
10 x 103
0
1
2
3
4
0
2
4
6
8
Predicted
Predicted
b. Using eq 4 and 1 with tabular values of ρf.
a. Using eq 1, 7 and 8.
Figure 15. Comparison of predicted and measured resistance values.
The term (ρ0wa) is in kilograms per meter. It is
resistance of a trailing wheel can be considered a
interesting to note that adding a term for the fourth
constant in most cases; however, snow falling back
axle adds little to the accuracy of the equation and
into the rut behind a leading wheel results in
forces the coefficient for the third axle to be nega-
higher values and seems to be related to initial
tive, a physical impossibility. The rationale for the
snow depth. The true effect of wheel width on
ratio of snow depth to the depth of 0.22 m is to
resistance of a leading wheel is still not known and
should be studied using a numerical technique
account for the effect of snow falling back into a rut
where other parameters can be held constant. Lim-
behind a leading wheel in deep snow. The trailing
ited data were presented for undercarriage drag,
tire coefficients obtained are higher than antici-
and since this will be the primary cause of immo-
pated, and this is thought to be attributable to
higher loads on the trailing axles for most of the
bilization on level surfaces, it deserves further
vehicles in the data base, as compared to the CIV,
investigation.
which has less weight on the trailing axle.
A new and significantly improved algorithm
Other forms of the term (ρ0wa) were investi-
for predicting sinkage and motion resistance in
gated using the ideas presented earlier; little or no
undisturbed snow was presented. This improved
improvement was found in the regression analy-
algorithm should be implemented in current cold
sis. Figure 15 shows a comparison of the predicted
regions mobility models.
vs. measured resistance. It can clearly be seen that
eq 8 produces excellent results and a marked im-
provement over earlier algorithms. Table C1 con-
LITERATURE CITED
tains the actual predictions and residuals.
Blaisdell, G.L. (1983) The CRREL instrumented
vehicle: Hardware and software. USA Cold Re-
gions Research and Engineering Laboratory, Spe-
SUMMARY
cial Report 83-3.
Several aspects of the interaction between snow
Blaisdell, G.L. (1987) Trailing-tire motion resis-
th
and a wheeled vehicle were investigated. The
tance in shallow snow. Proceedings of the 9 Inter-
17

 Previous Page
Previous Page
