

Evaluation of New Sensors for Emergency Management
23
6
CONCLUSIONS
Detectable-objects matrix
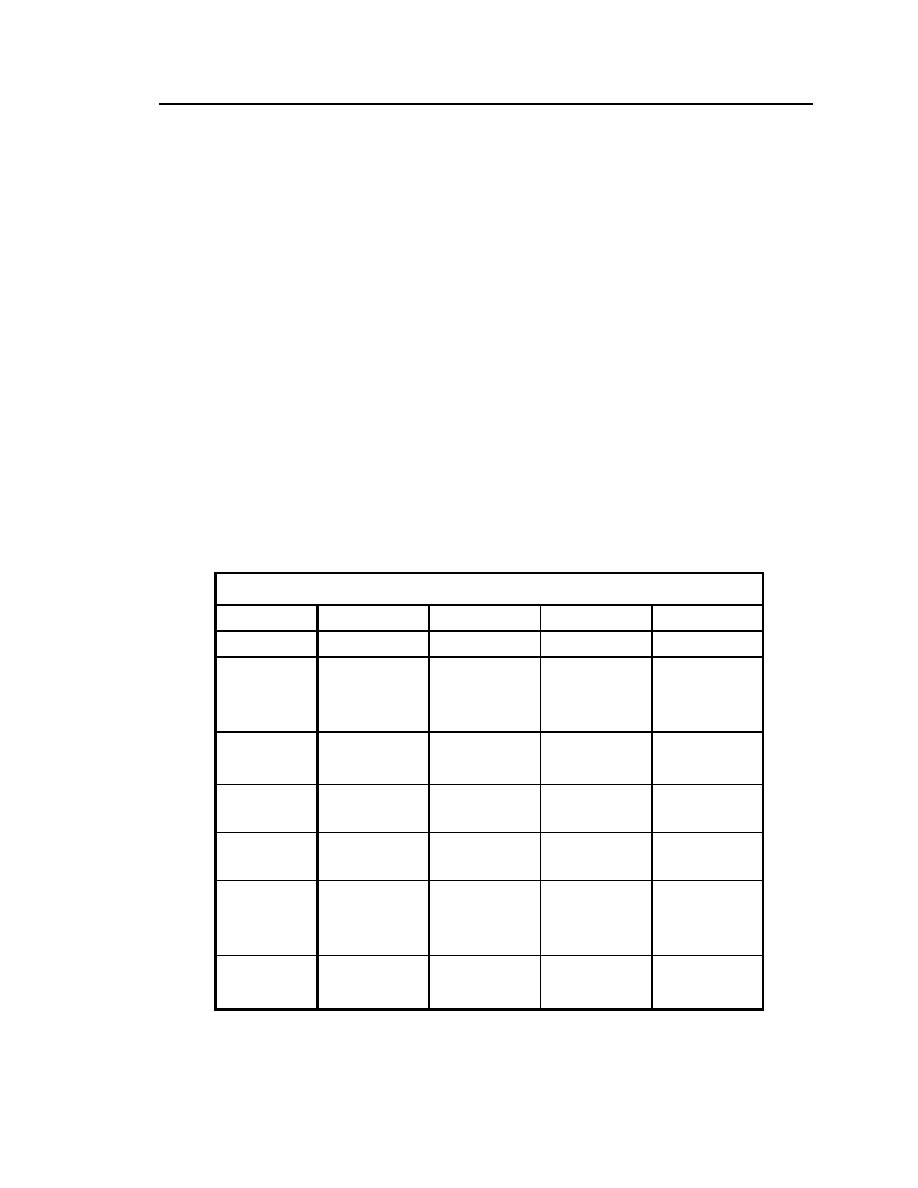
Table 1 shows a detection matrix for objects as a function of GSD. Individual
roof rafters are always distinguishable with 8-in. GSD and often with 1-ft GSD.
Wood covering vs. tarpaper and/or shingles can always be determined with 1-ft
and 8-in. GSD, and often with 2-ft GSD. Saturation of all three bands and the
resulting absence of contrast tend to obscure rafter detail.
Information in cloud shadows is not completely recoverable, but if there are
few of them, sufficient solar illumination, and enough sensor quantization levels,
then some information is available from the shadowed regions. Palms can be dis-
tinguished from other species with 8-in. GSD. The best display for visual inter-
pretation of objects with these data sets was bands 1, 2, and 3 in red, green, and
blue with a 2Σ (standard-deviation) stretch to enhance image detail. We used the
ERDAS image processing program (ERDAS 1999).
Table 1. Detection matrix for objects at various GSDs.
Objects/GSD
3-ft
2-ft
1-ft
8-in.
Roof rafters
Not visible
Barely visible
Often visible
Visible
Shingles/tar-
Can determine
Can determine
Can sometimes
Can often
paper (other)
wood vs. other
wood vs. other
separate
separate
vs. plywood
cover
cover
Rafters in 3-
Causes rafter
Causes rafter
Causes rafter
Causes rafter
band satura-
detail loss
detail loss
detail loss
detail loss
tion
Broad-leaf vs.
Cannot
Can determine
Can determine
Palms are
narrow-leaf
separate
leaf on/off
leaf on/off
always visible
All in cloud
Some info
Some info
Some info
Degrades image
shadow
recoverable
recoverable
recoverable
Roofs as a
Best detail, near
Best detail,
Best detail,
Best detail,
function of sun
zero angle,
medium angle,
medium angle,
medium angle,
to zenith angle
overhead sun
shadow casting
shadow casting
shadow casting
All in1,2,3
Enhances
Enhances
Enhances
Enhances
RGB, 2Σ
imagery
imagery
imagery
imagery
stretch

 Previous Page
Previous Page
