

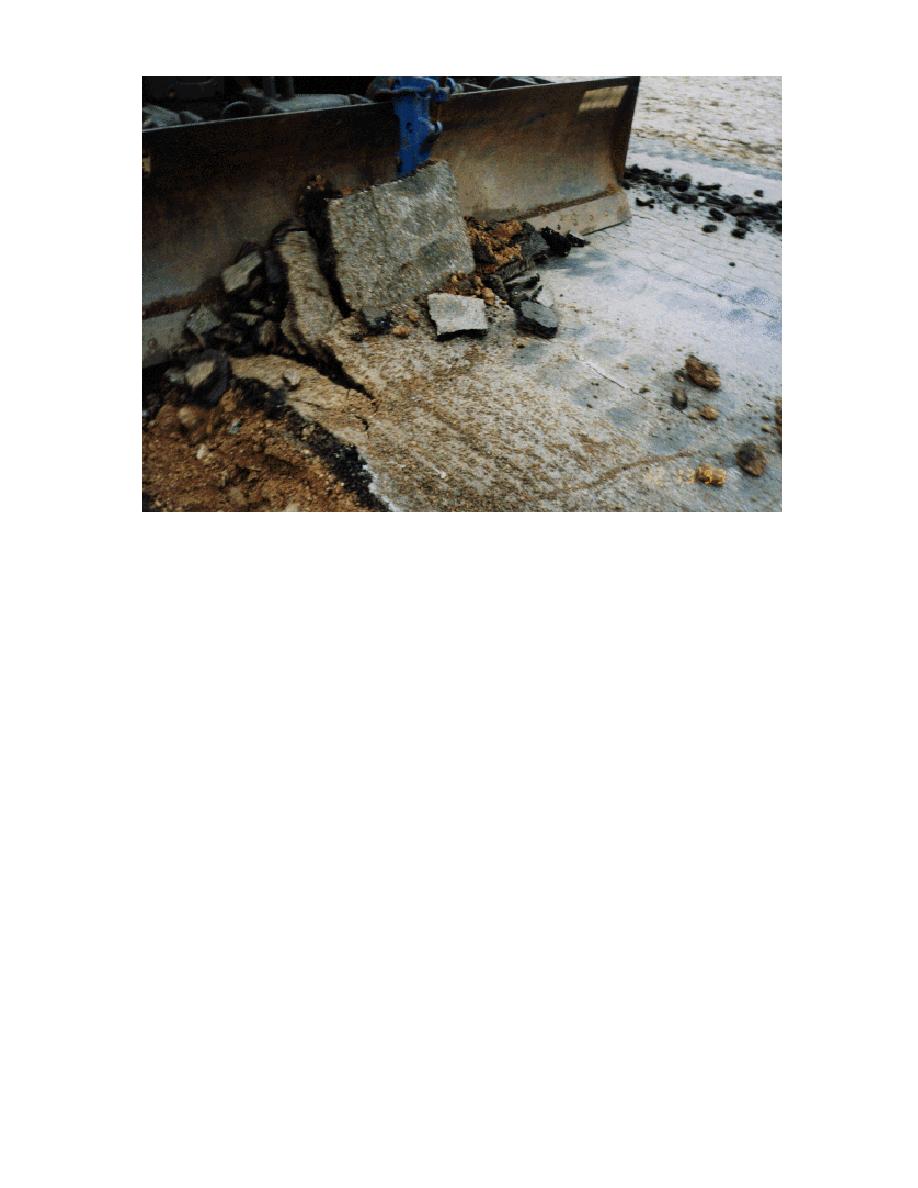
Figure 11. Ripper shown at full penetration in asphalt pavement with the blade sliding along the pavement
surface. The slots cut during the previous passes are similar to those produced in thin seasonal frost.
school (Fig. 11). At no time was ripping resistance
planned depth. In hard ground, maintaining the
great enough to cause track slip or any significant
depth was a problem, since tooth configuration
motion in the suspension of the machine. Ripping
and variations in material properties tended to
this thin frost seemed effortless.
cause large fluctuations in the vertical force re-
In contrast, ripping at the site with thick frost
quired to control the ripper. The ripper would
was noticeably different, with much greater resis-
tend to grab and pull into the ground, loading the
tance to ripper advance. Ripping to the depth of
suspension system. This would result in the rip-
the ripper (14 in. [36 cm]) usually required three
per cutting a deeper groove, which could slow
passes. Ripping forces were also great enough to
forward progress and occasionally stop the ma-
affect traction and cause significant interaction
chine. Attempts to respond by pulling up the blade
with the suspension. As with the commercial trac-
only compressed the suspension further until suf-
tors, the best performance was obtained when
ficient vertical force was available to pull the rip-
passes were made parallel to a cut ripped to full
per up, out of the ground; sometimes the ripper
depth, which provides an additional free face for
jumped to a position above the ground surface
material failure. The large size of the frozen blocks
when the suspension unloaded. It was not pos-
produced can be seen in Figure 12. Since ripping
sible to fine tune the depth of cut as it was with
to full depth required successive passes, it was
the commercial tractors that have no suspension
necessary to hold the blade in a position that
system. However, careful teamwork between the
would permit incremental penetration.
operator and the spotter on the ground and good
Initial penetration was not difficult, and Figure
operating technique can reduce this problem and
12 shows the CEV starting a pass while holding
maintain productive ripping.
the blade in a position that would allow 6 to 8 in.
A technique that worked well was based on
(15 to 20 cm) of penetration. Very little down
responding to changes in forward progress. Once
pressure on the blade was required to reach the
the operator sensed that forward progress was
11

 Previous Page
Previous Page
