

where ρ0 = density of the snow immedi-
120
ately in front of the vehicle's
L
HML
running gear (Mg/m3)
CAV
L hallenger
a = length of the tire or track in
BAV (all tires)
contact with the snow (m)
Mradley
80
S 113
b = maximum width of the tire or
HUSV
track (m) (Fig. 3).
HMMWV
5 EMTT
C- Ton
This resistance value is applied to up to
IV
40
four axles or one track set on the vehicles of
interest (including any towed units). For
unknown reasons, predictions of resistance
for the Small Unit Support Vehicle (SUSV)
0
300 are most reliable when only the leading
0
100
200
track set is considered (Richmond et al.
Normal Stress (kPa)
1990). Recent analysis by Richmond (in
Figure 2. Vehicle traction on snow.
prep.) indicates that only the first three ax-
For shallow, undisturbed snow lying on top of
les passing through undisturbed snow are impor-
a strong substrate, we calculate gross traction
tant; we apply this equation to the first four axles
(kN) for one driven wheel or track element i
since the HEMTT with four axles was included
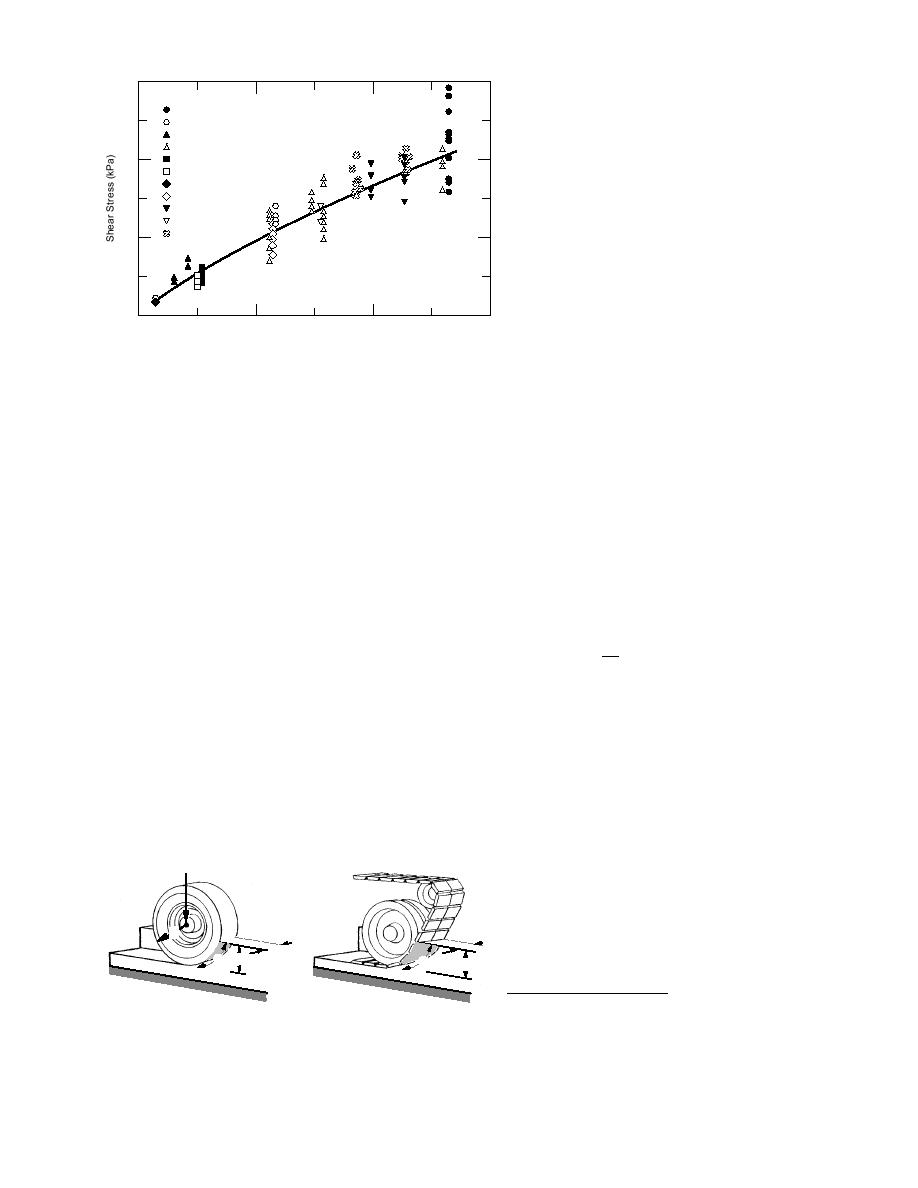
(Blaisdell et al. 1990) as
in development of eq 3. The data forming the ba-
sis of eq 3 are displayed in Figure 4. Although
Tgrossi = 0.851 Ni
0.823
the trend is strong, the r2 value is low (0.39), and
(2)
Ai
research refining our understanding of vehicle
where Ni is the normal stress (kPa) on driving ele-
motion resistance in snow is continuing.*
ment i and Ai is that element's contact area (m2).
The length a of a tire or track contact with
The total gross traction for a vehicle is the sum of
snow in eq 3 requires the calculation of vehicle
the traction obtained for each driven wheel or
sinkage z (Fig. 3). This is accomplished by the fol-
track. This equation is based on data generated
lowing equation for sinkage in undisturbed shal-
from a wide range of vehicle types and sizes
low snow:
(both wheeled and tracked, with contact pres-
ρ
sures ranging from 10 to 250 kPa) (Fig. 2). The
z max = h 1 0
(4)
correlation coefficient for this equation (r2) is
ρf
0.97, with data from the standard military ve-
hicles falling within 9 to 16% of the predicted
where zmax = maximum predicted sinkage (cm)
value.
in snow occurring under the tire or
The equation for motion resistance (N) in un-
track with maximum contact pres-
disturbed snow is
sure pmax
h = initial snow depth (cm)
Rterrain = 68.083 (ρ0 b a)0.9135
ρ0 and ρf = initial and theoretical final densities
(3)
(Mg/m3), respectively (Fig. 5).
The final density ρf is a function of the ap-
plied load. In temperate regions with sea-
W
sonal snow, the following ρf values are used
as estimates; they are based on analysis of
field sinkage measurement, as illustrated in
r
b
b
Figure 6:
a
z
a
z
*A new resistance algorithm presented by Rich-
b. Track.
a. Wheel.
mond (in prep.) for wheeled vehicles in snow will be
Figure 3. Snow and vehicle characteristics.
incorporated in an NRMM version newer than 2.5.0.
3


 Previous Page
Previous Page
